杨铭地平线 地平线机器人杨铭:自动驾驶远不是图像识别这么简单
2月21日,由网易科技和DeepTech深科技联合主办的《麻省理工科技评论》2017年"全球十大突破技术"发布会在北京举办。本次大会立足技术趋势,探索全球技术发展的内在原动力,探讨人工智能、量子计算、基因疗法等领域的技术和商业趋势。

地平线机器人技术联合创始人&软件副总裁 杨铭
地平线机器人技术联合创始人杨铭在会议现场表示,强化学习这几年取得了长足的发展,但在自动驾驶领域中还处于刚刚应用的阶段。这个过程中,通过模拟器,把一些情况去模拟出来,然后让"机器"用增强学习验证,控制的路径规划算法,这是未来强化学习的方向。杨铭表示,增强学习在图像识别、自动驾驶整个技术链条中是很关键的因素,但目前为止还是一个比较有潜力的,还是一个辅助的角色。

以下为现场速记实录:
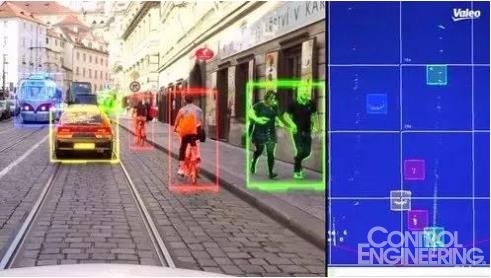
主持人:我们想问杨铭先生,通过图象识别来解决自动驾驶是比较通用的一种方式,地平线在这个领域取得了不俗的成绩。所以,能否简单介绍一下强化学习在图像识别和自动驾驶中发挥的作用?

杨铭:目前,整个产业链上可能分几个链条,包括整车厂提供汽车,也包括一级供货商提供自动驾驶的方案,地平线机器人可能更注重于把一些专门的技术做好,把图象识别的技术做好,把信息融合如何决策做好,作为一个二级供货商,给大家提供解决方案。所以,这是我们现在的一个位置。

图像识别,我觉得单独作为一个自动驾驶的全系统,其实还是不足的,还需要跟很多包括雷达、地图等其它信息融合,来构成一个无人驾驶的系统。

但是,图象识别有一些自己的优势,它的扩展能力是很强的,可以识别出很多事先并没有完全想到的物体,包括一些更新。而且,它可以克服对信息理解要比较细致的精度,比如雷达之类的,可以知道那有一个物体,但到底是什么物体就并不清楚了。

举个简单的有意思的事情,如果地上有一个易拉罐,这种铁的东西,但是对于某些传感器来说,看上去有可能是一个很严重的问题,因为它是金属的,但如果是图象识别,可以看出它的大小、位置,反而能避免。所以,图象识别是一个更有潜力,得到信息更全面,但是它自己还不足以构成一个完全的自动驾驶系统。
我觉得强化学习这几年,尤其是去年到今年还是很火的,在自动驾驶这个领域中,它目前可能还处于一个刚刚应用的阶段,更重要的是说,如何通过模拟器,能够把一些情况去模拟出来,然后用增强学习验证,控制的路径规划算法,去验证。
但是在图像识别中,我们可以看到已经有很多的应用了,包括如何通过增强学习的方式,动态的过程,把图像中哪些最关键的点识别出来,通过自动学习的方式,在部署之后,能够做一些反馈提高这个系统。

总得来说,我觉得增强学习,在图像识别、自动驾驶整个技术链条中,它会是一个很关键的因素,但是可能目前为止还是一个比较有潜力的,还是一个辅助的角色。我估计在今年一两年可能会帮助其他的系统去提高,包括在控制领域有一些比较大的贡献,但是目前还是一个潜力比较大的分享,也是一个突破性的技术。

地平线机器人,目前我们也是把增强学习的技术跟图像识别,跟一些信息的融合都放在一起,提供一个比较好的方案,我们现在也推出了一些,开始是辅助驾驶,一些辅助驾驶的产品,也会提供一些自动驾驶关键的核心技术,和一些车厂、一级供应商合作,一起来把这些人工智能、深度学习的技术推向市场,推向到大家生活中去,这是我们努力的方向。
















{kind=link}